根轨迹有什么用 根轨迹作图的约束条件
根轨迹的作用,matlab 求根轨迹(为了使用稳定边界法整定PID参数,怎样利用根轨迹确定系统的稳定性?根轨迹法的应用简介,开环根轨迹增益 和 开环增益 是一样的吗? 不一样有什么不同?根轨迹中主导极点的作用。
本文导航
根轨迹与系统性能的关系
自动控制原理研究的是系统的稳定性,准确性,快速性.
根轨迹其实就是一判断系统稳定与否的方法,系统极点全部在坐标平面的左半平面,那么系统稳定.反则不是
用matlab画出幅频和相频特性曲线
1、根轨迹从原理上是针对有理分式而言的,不适用于有时间延迟的系统。如果要画根轨迹,常用做法是对延迟环节进行Pade近似,这可以通过pade函数来做,例如:
rlocus(pade(G0,2))其中2是延迟环节的Pade近似阶次,也可以取其它值,但不同阶次得到的结果会有一定差别。当然,作为近似方法,无论取任何阶次,都不可能和原系统完全等同。
2、我不知道你所说的“使用稳定边界法整定PID参数”是什么概念,PID是控制器,被控对象是什么?就是一个纯延时的环节吗?
3、去掉延时,G0是一个单极点的传递函数,只有一个根轨迹分支(在极点左侧),并非gain为0。
4、如果只是要确定能使得闭环稳定的开环增益,还不如使用频率稳定判据。nyquist、bode等函数都可以直接用于有延迟的系统。
5、例题的那些说法,没有上下文,我无从判断。
由根轨迹图判断系统是否超调
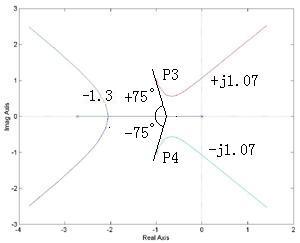
1.只要绘制的根轨迹全部位于S平面左侧,就表示系统参数无论怎么改变,特征根全部具有负实部,则系统就是稳定的。
2.若在虚轴上,表示临界稳定,也就是不断振荡
3.假如有根轨迹全部都在S右半平面,则表示无论选择什么参数,系统都是不稳定的。
如何通过根轨迹增益判断系统稳定
根轨迹图可以分析系统的各种性能。
稳定性
根据开环增益从零变到无穷时,根轨迹均在s平面的左半部,系统对所有的值均是稳定的。
2.稳态性能
因为开环传递函数有一个极点位于复平面 s坐标原点(在根轨迹图中,用×表示极点,用O 表示零点),所以系统为I型系统,阶跃作用下的稳态误差为零,静态速度误差系数即为根轨迹上对应的值。如果给定了系统在速度信号作用下的稳态误差要求,则由根轨迹图可以确定闭环极点的容许范围
3.动态性能
(1)当时,每个值对应的闭环极点为两个不相等负实根,系统呈过阻尼状态,阶跃响应为非周期过程。
(2)当时,闭环极点为两个相等负实根,系统呈临界阻尼状态。
(3)当时,每个值对应的闭环极点为一对共轭复根,系统呈欠阻尼状态,阶跃响应呈衰减振荡过程,且超调量将随K值的增大而加大。
开环增益和时间常数的关系
开环根轨迹增益:在求系统的根轨迹时常用这种形式,指开环传递函数变换成零极点形式的比例系数。类似于(S+a)这种“首1”形式后的比例系数,常用K*来表示。
开环增益:在求稳态误差或频域分析时用的比较多,指开环传递函数变换成时间常数形式的比例系数。即(tS+1)的“尾1”形式后的比例系数,长用K来表示。
开环根轨迹增益和开环增益两者有一定的对应关系,但通常不相等。比如:
某系统开环传递函数为G(s)=4/[s(s+0.2)]=20/[s(5s+1)]
第一种形式为零极点的形式,第二种为时间常数的形式。
根轨迹增益是4,开环增益是20。
根轨迹作图的约束条件
根轨迹是开环系统某一参数从零变化到无穷大时,闭环系统特征根在s平面上变化的轨迹。可分成常义根轨迹和广义根轨迹。根轨迹有180度、零度根轨迹和参量根轨迹。